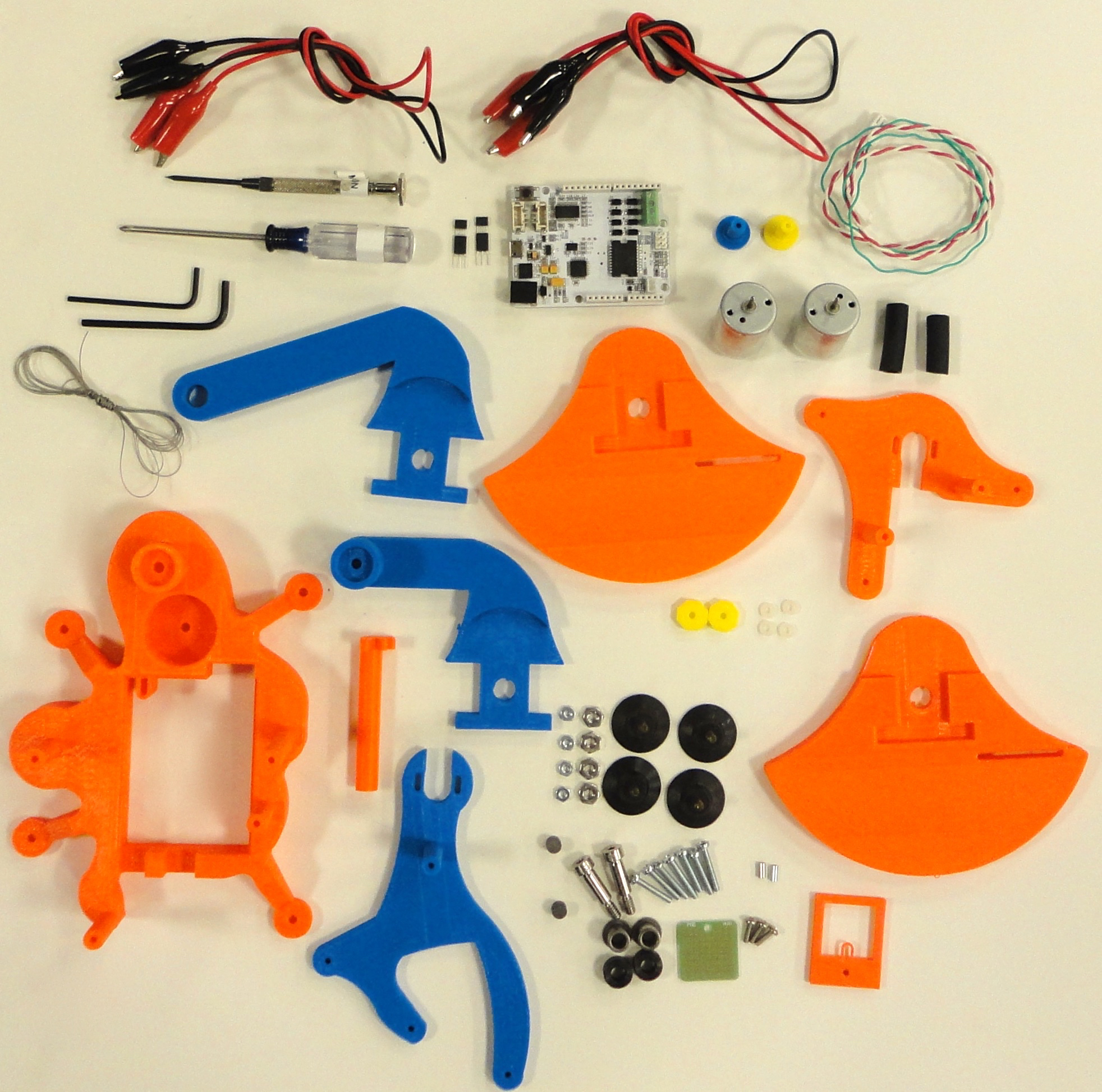
We have designed two two-degree-of-freedom (2-DOF) devices based on Hapkit. Both are made out of 3-D printed structural components and use the Hapkit Board. We highly encourage you to build them after you have built your Hapkit! We are working on updating the code base and design of our devices. Currently some features of the devices are not available. We apologize for the inconvenience and will upload the code and designs as soon as possible.
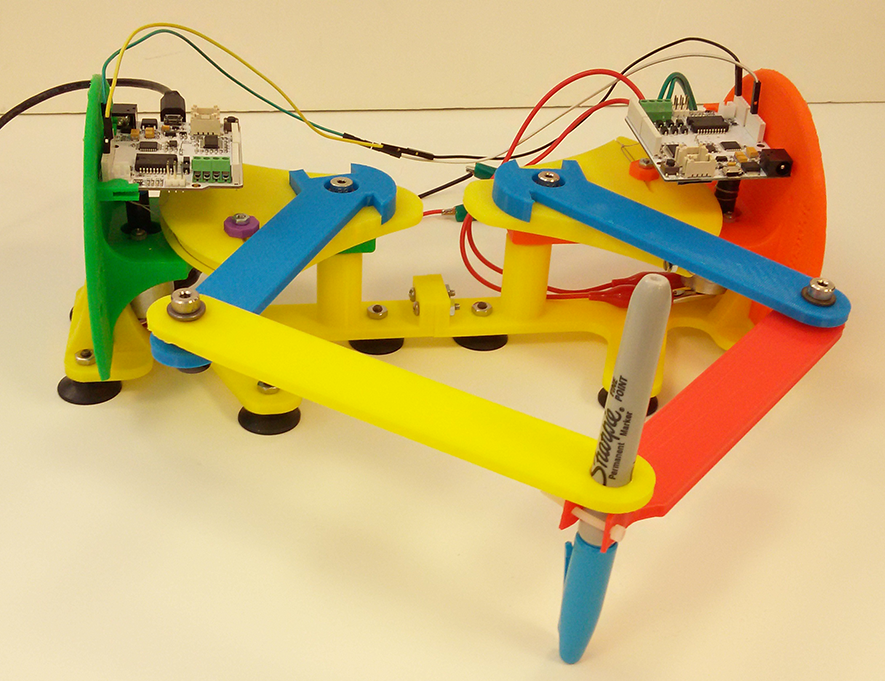
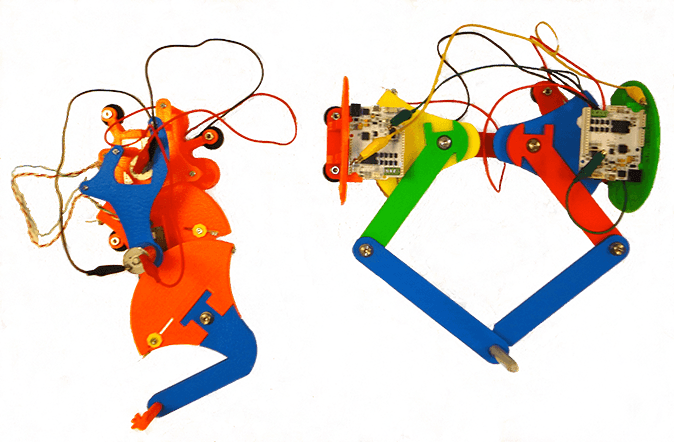
Graphkit is a 2-DOF haptic device that was originally designed with the aim of turning Hapkit 3.0 into a programmable drawing tool. It is made from two original Hapkits 3.0 and a few additional parts combined into a Pantograph design. The information on how to build Graphkit as well as example code is below:

We are working on Arduino code to get you started programming haptic virtual environments with your Graphkit. It is currently unavailable.

Haplink is a 2-DOF haptic device that was created as a customization project for Hapkit. Haplink is composed of two Hapkit Sector Pulleys connected in series using a novel mechanism that keeps both motors grounded. We are currently working on updating the Haplink design, and as such its files are currently unavailable. We apologize for any inconvenience.
Currently unavailable.