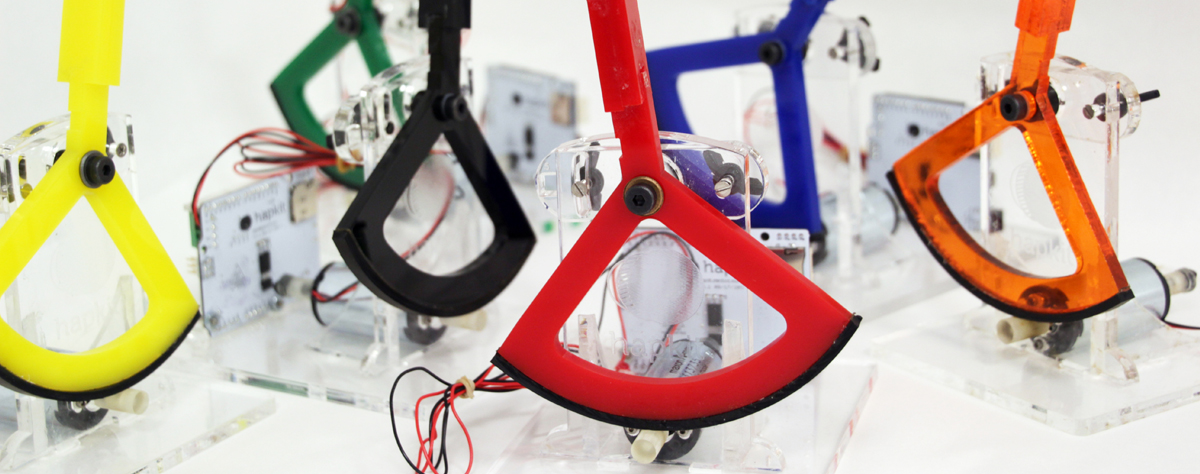
The Hapkit is a version of the Haptic Paddle, which was originally designed in Prof. Mark Cutkosky's laboratory at Stanford University in the mid-1990s. The Haptic Paddle was used as an educational device that students could assemble and program to learn about dynamic systems. The Haptic Paddle concept proved useful in both research and teaching, and a number of haptics research labs have developed their own versions of the device.
While some design details change from paddle to paddle, all Haptic Paddles share an important set of features:
Prof. Allison Okamura previously worked with the original Haptic Paddle as a graduate student at Stanford and used a similar version in classes at Johns Hopkins University. After joining the Stanford Mechanical Engineering faculty in 2011, Allison, along with Teaching Assistants Ann Majewicz and Nick Colonnese, used another version of the Haptic Paddle in a graduate course on haptics. In 2012 they used an Arduino as the Haptic Paddle microcontroller, which greatly reduced costs and allowed students to use their laptops for programming the device.

In 2012, Allison began to collaborate with Prof. Paulo Blikstein in the School of Education to explore new educational applications of haptics. They decided to implement the Haptic Paddles for large educational projects, such outreach programs and a new online course on haptics. It was clear that existing Haptic Paddle designs would need to be revised in order to allow non-haptics experts to assemble and use the device with no supervision.
Graduate student Tania Morimoto led the re-design, which involved a few but important changes to the Haptic Paddles we used previously. First, we "flipped" the joystick configuration as was done at Rice University, University of Utah, and Vanderbilt. Second, we took the advice of Prof. Bob Webster's group at Vanderbilt University to use a "friction drive. This eliminated a highly effective but difficult-tomaintain capstan transmission from the original Haptic Paddle design. Third, we include a force-sensitive resistor to give you another input for creating interesting haptic effects, as well as record force data to measure the force feedback. Fourth, to lower the cost of the microcontroller and amplification (which is usually not included the cost quoted for other Haptic Paddles), we worked with Seeed Studio, an open hardware facilitation company, to design an all-in-one controller board. The Hapkit Board is approximately the size of an Arduino Uno and includes a microcontroller, motor driver/amplifier, Micro SD for recording data, Hapkit-specific sensor connections, as well as other digital and analog lines.
We hope that Hapkit will do for haptics what inexpensive robotics kits have done for the field of robotics. What will happen when this technology gets in the hands of a larger group of innovators and makers? We encourage you to modify the Hapkit design and create unusual new devices for touch interaction. Please share with us what you have done with your Hapkit.
We will pilot Hapkit in Fall 2013 in a Stanford Introductory Seminar called ME 20N: Haptics: Engineering Touch and an online haptic course to be announced shortly. At this time we can only offer complete kits to students enrolled in these courses, but you can read on this site about how to build your own kit
Support for the Hapkit project is provided by Stanford University Vice Provost for Online Learning, Stanford University School of Engineering, the Powell Foundation, and the National Science Foundation (grants #1217635 and #1227406).
Please note that the Hapkit name is also used for another haptic device – a haptic drum kit – designed by Peter Bennett.
The main developers of Hapkit as of November 2015 are:




Many other people contributed to the design of Hapkit, its Haptic Paddle predecessor, and the materials on this website, including:
Stanford University: Mark Cutkosky, Jesse Dorogusker, and Chris Richard (original Haptic Paddle designs); David Beach (design input); Marlo Kohn, Danya Volkov, and Ian Connolly (help with prototyping); Kunal Chawla (SD card reader software); Roger Huang (electrical design); CHARM Lab members, especially Matthew Weber, Zhan Fan Quek, Nick Colonnese, Ann Majewicz, Darrel Deo, and Melisa Orta (help with development and testing); Lester Su (Hapkit name)
IISME Program/Evergreen Valley High School: Alexander Miller (experiment design and testing)
Seeed Studio: Albert Miao (hapkit board design), Bruce Qin (hapkit board design), and Fiona Shao (administration)
Vanderbilt University: Robert Webster and Jenna Gorlewicz (friction drive concept)
University of Utah: William Provancher (design input)
Megan Chiou (logo and web design)